登录
登录
 注册
注册
rfid技术助力AGV站点识别及路径规划
传统AGV车主要依靠固定的磁条线进行导航,虽布设成本低、定位精确,但面临着灵活性差、只能按照磁条行走、作业效率低等问题,且容易受到周围金属物资的干扰,难以满足复杂线路的需求,为进一步提升AGV车的使用性能,将RFID技术与磁导航技术相结合。由于RFID不会受到磁条、铺设、环境等因素的影响,所以RFID传感器可以非常精准的识别到RFID地标标签信息,从而可以在关键节点对AGV车进行站点识别和路径规划。

1、AGV无人搬运小车站点识别及路径规划通过在AGV小车底部加装RFID地标传感器,行车节点安装RFID地标标签,当AGV小车行驶至每个节点时,地标传感器就会自动获取地标卡信息进行数据传输,以便AGV小车作出变速、转向、停车、等相应动作,助力AGV车进行精准的站点识别及路径规划,实现物料运输的自动化、信息化、透明化、高效率管控。

要做到精准停车,RFID地标传感器要有适中且稳定的读卡距离,读距太近意味着AGV底盘要做的很低,这无疑增加小车故障率,读距太远则意味着定位不准确,无法实现精准的站点识别。RFID地标传感器还需要达到一定的识读速度,识别速度如果跟不上AGV的行驶速度,那么将会导致RFID地标传感器无法读取到地标标签的信息,控制系统会因接收不到信息无法给AGV执行站点识别和路径规划的指令。
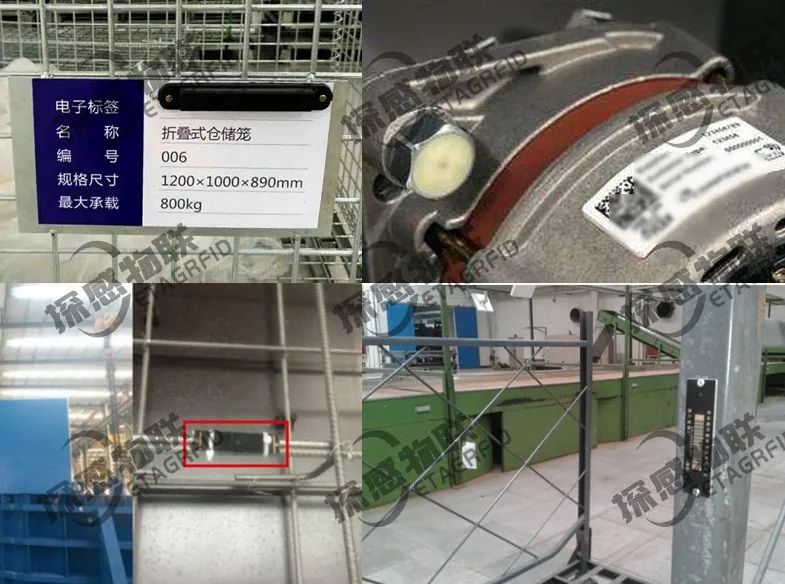
2、挂轨巡检机器人站点识别及路径规划挂轨巡检机器人能够替代人工完成例行巡查、故障诊断、预警报警等任务,突破传统人工巡检的限制,实现巡检智能化,主要应用场景有:配电房、管廊、隧道、化工厂、机房等。通过将RFID标签安装在行车轨道上,RFID传感器安装在巡检机器人内面向轨道标签的一面,以便减少周围环境对RFID传感器读取标签的影响。

当装有RFID传感器的巡检机器人行驶至相应的轨道节点时,自动读取RFID标签信息,根据读取到的标签信息对自身进行站点识别及路径规划,再将相应站点的巡检信息一并上传到巡检管理系统。根据巡检机器人的行驶速度来选择合适的RFID传感器以便能够精准的进行站点识别和路径规划,这种应用场景下的轨道一般以金属材质为主,因此需搭配具备抗金属性能的RFID标签使用。
3、AGV无人叉车站点识别及路径规划AGV无人叉车是一种自动导航的移动机器人,可代替人工搬运,实现物料运输、装卸货物等任务,目前AGV叉车应用较多的场景为高位仓库、库外收货区、产线转运等,主要用于生产制造、物流等行业。

通过在AGV叉车上安装RFID传感器感知环境获取标签信息并做出相应决策,依据预设的路径规划进行站点识别完成自主导航,并通过在货物托盘、货位货架等地方安装RFID标签来识别货物信息(批次、仓库存放信息等),AGV叉车再根据RFID传感器读取到的标签信息规划货物运输的站点路径,实现对货物的自动识别和定位,以便精准叉取货物,同时还可监管货物流转的每个环节。