登录
登录
 注册
注册
英国研发基于激光雷达的3D全息抬头显示器
英国研究人员利用激光雷达(LiDAR)创建物体的高清全息图像,并将其投射入驾驶员的眼睛。

据麦姆斯咨询报道,英国研究人员面向汽车应用开发出首个基于激光雷达(LiDAR)的3D全息抬头显示器。通过对这项技术的原型版本进行测试,其结果表明:它可以通过“透视”物体来警告潜在的危险,而不会分散驾驶员的注意力,从而可以提升道路安全性。

这项技术由剑桥大学、牛津大学和伦敦大学学院的研究人员共同开发,使用激光雷达衍生的数据来创建道路物体的超高清全息图像。这些图像被直接投射入驾驶员的眼睛,而不是像大多数的汽车抬头显示器利用二维挡风玻璃进行投影。
虽然这项技术尚未在汽车上进行测试,但是根据伦敦市中心一条繁忙街道收集的数据进行的早期测试显示,3D全息图像会根据其实际位置出现在驾驶员的视野中,形成增强现实(AR)效果。
这在诸如路标之类的物体被大树或卡车遮挡的情况下尤其有用,例如允许驾驶员“透视”视觉障碍物。该项结果发表在《光学快报(Optics Express)》上。
剑桥大学工程系博士研究生Jana Skirnewskaja说道:“抬头显示器正被整合到联网车辆中,通常会将车速或燃油油位等信息直接投射到驾驶员面前的挡风玻璃上,驾驶员必须保持警惕。不过,我们想更进一步,将中的真实对象表示为全景3D投影。”
Skirnewskaja和她的同事使用激光雷达(LiDAR)扫描了伦敦市中心UCL校园的一条繁忙街道——Malet Street。合著者Phil Wilkes是一位使用激光雷达扫描热带森林的地理学家,他通过激光雷达技术扫描整条街道,然后将激光雷达数据转换为点云数据,建立三维模型。
Wilkes介绍说:“通过这种方式,我们可以将扫描结果拼接在一起,构建一个完整的场景,不仅可以捕捉到树木,还可以捕捉到汽车、卡车、人、标志,以及你在典型城市街道上看到的一切。虽然我们捕捉的数据来自一个固定的平台,但它类似于下一代自动驾驶或半自动驾驶汽车中的传感器。”

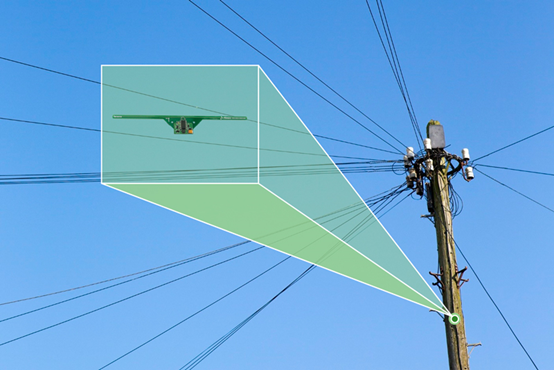
激光雷达扫描平台(采用1550nm激光器)
3D全息图像转换
当Malet Street街道的3D模型完成后,研究人员将街道上的各种物体转换成全息投影。采用分离算法对点云形式的激光雷达数据进行处理、识别和提取目标。

Malet Street街道的3D模型建立
然后另一种算法将目标物体转换成计算机生成的衍射图案。这些数据点通过光学装置处理,以将3D全息对象投射到驾驶员的视野之中。

激光雷达数据转换为3D全息投影
借助先进的算法,该光学装置能够投影多层全息图。全息投影能够以不同的尺寸出现,并与街道上被描绘的真实物体的位置对齐。例如,一个隐藏的街道标志会以全息投影的形式出现,相对于障碍物后面的实际位置,起到警报机制的作用。

全息图像生成
展望未来,研究人员希望通过个性化抬头显示器的布局来完善他们的系统,并创造了一种能够投射多层不同物体的算法。这些分层的全息图可以在驾驶员的视觉空间中自由排列。
“这种分层技术提供了一种增强现实的体验感,并以一种自然的方式提醒驾驶员。”Skirnewskaja介绍说,“通过实时显示道路物体,全景全息投影可以成为现有安全措施的一个有价值的补充。3D全息图像可以提醒驾驶员,但不会分散其注意力。”
研究人员现在正致力于使全息装置中使用的光学元件小型化,以便使它们可以集成到汽车中。一旦集成完毕,将在剑桥的公共道路上进行车辆测试。