登录
登录
 注册
注册
中科院利用触觉传感器大幅增强机器人的皮肤触觉
作者:本站收录
来源:前瞻经济学人
日期:2021-05-19 09:36:08
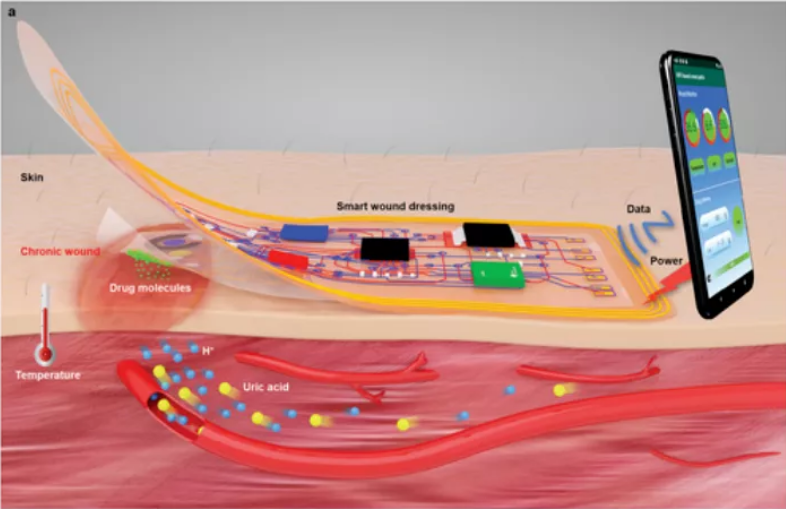
摘要:触摸感知,是人类最重要的感知能力之一,智能机器人也是如此。目前对触觉传感器的研究主要集中在电子皮肤(e‐skin)上,但电子皮肤在重复使用后容易被弄脏、损坏和干扰,极大地限制了其在机器人中的实际应用。
关键词:触觉传感器
前言
王中林院士AFM:仿生毛须,可增强机器人的皮肤触觉
触摸感知,是人类最重要的感知能力之一,智能机器人也是如此。
目前对触觉传感器的研究主要集中在电子皮肤(e‐skin)上,但电子皮肤在重复使用后容易被弄脏、损坏和干扰,极大地限制了其在机器人中的实际应用。
在这里,通过模仿动物使用毛发传感器探索环境的方式,一种可弯曲的仿生胡须机械感受器仿生毛须机械感受器(biomimetic whisker mechanoreceptor,BWMR)被设计用于机器人触觉感知。
由于摩擦电纳米发电机技术的优势,仿生胡须机械感受器可以在不需要电源的情况下将外界机械刺激转化为电信号,这有利于其在机器人中的广泛应用。
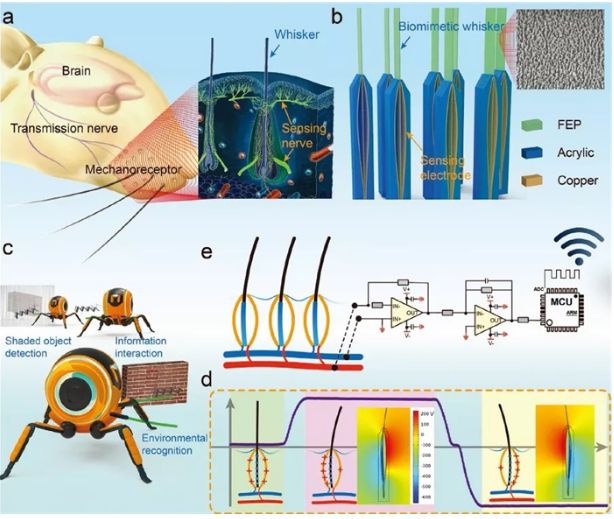
由于毛须的杠杆效应,仿生毛须机械感受器可以通过放大外部微弱信号来区分1.129 μN的激振力。而增加毛须长度,可以进一步改善这种效应。实时传感是用BWMR演示的,展示了它在机器人触觉系统中的潜力。
该传感器具有易于制造、成本低、灵敏度高和稳定性好的优点。在此基础上,作者还设计了基于静电计原理的信号采集电路,以构建用于机器人技术和工业应用的触觉传感系统。
这种BWMR感受器有望被开发成多功能的扰动接收器阵列,可广泛用于环境监测、参数指示和工业设备感测以及机器人导航的触觉技术、猎物跟踪和危险规避。
上述研究以“Biomimetic Hairy Whiskers for Robotic Skin Tactility”为题,发表在最新一期《先进材料》(Advanced Materials)上。